SmallSats Are Getting Larger. What Does That Mean for Attitude Control?
Authored by A. Huang
What Is a SmallSat?
The term "SmallSat" appears constantly in industry literature, mission proposals, and market reports, but it means different things depending on who is using it. There is no single globally accepted definition, and the mass boundaries adopted by different organizations reflect their own purposes rather than a shared engineering standard.
| Organization | Mass Threshold | Term Used | Purpose |
|---|---|---|---|
| NASA | < 180 kg | SmallSat | Technology survey scope |
| ASI(Italian Space Agency) | < 500 kg | Small Satellite | Adopted from JPL classification |
| Sweeting / SSTL | 500 – 1,000 kg | Small Satellite | Academic mass classification |
| BryceTech / FAA | ≤ 1,200 kg | Smallsat | Market tracking |
| ESA | Not mass-based | Small Satellite | Mission cost threshold |
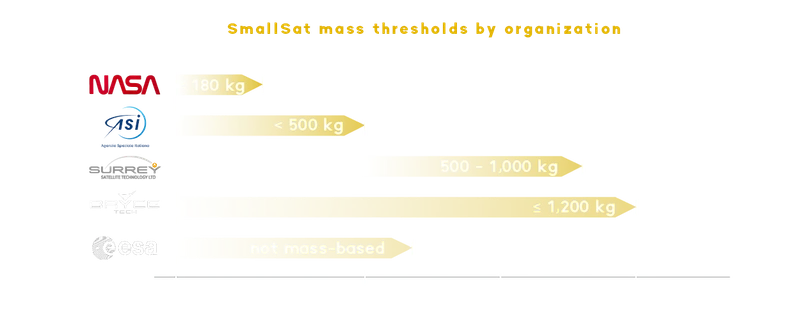
Figure 1. SmallSat mass thresholds adopted by major organizations.
Note that definitions vary by purpose: NASA's threshold reflects technology survey scope, BryceTech's reflects market tracking, and ESA does not use a mass-based definition.
NASA groups SmallSats into five subclasses, from minisatellite (100 to 180 kg) down to femtosatellite (0.01 to 0.09 kg). ASI, drawing on a JPL-originated scheme, extends the Small Satellite category up to 500 kg. Sweeting's academic classification places the "Small Satellite" label specifically in the 500 to 1,000 kg range, a mass range that NASA would classify as minisatellite or above. BryceTech's 1,200 kg upper limit reflects a market tracking purpose: covering the commercially active segment of the launch market rather than drawing a technical line. ESA takes a different position altogether. Its 1994 working group concluded that mass is not the right criterion, and proposed total mission cost as the defining threshold instead.
One distinction worth noting: microsatellite refers to a specific subclass within the SmallSat category, typically covering spacecraft between 10 and 100 kg. It is not a heavier tier above SmallSat, as the term is sometimes misread.
The variation across these definitions reflects the fact that SmallSat functions more as a practical label than a precise specification. The boundary sits where it is most useful for the purpose at hand.
As SmallSats Get Larger, ADCS Design Decisions Change
As covered in our previous analysis of spacecraft bus selection, average SmallSat mass among non-broadband operators (excluding Starlink and OneWeb LEO constellation satellites) reached 223 kg in 2024, up from 87 kg in 2021, and remote sensing now accounts for nearly half of all non-broadband SmallSat deployments. Heavier spacecraft occupy higher bus classes, and higher bus classes change what ADCS configurations are physically possible.
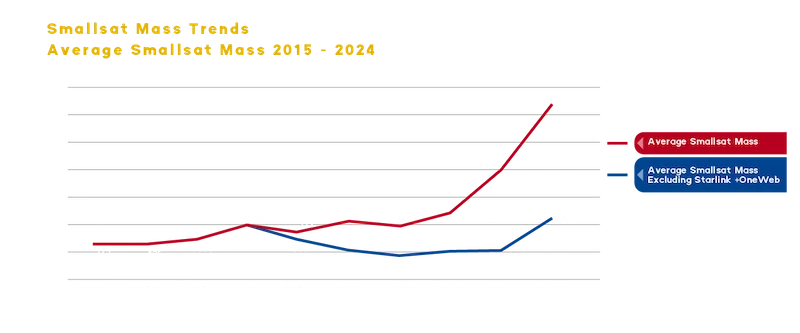
Figure 2. Average Mass of Smallsats (Excluding Starlink/OneWeb)
Reaction wheels and magnetorquers have historically dominated actuator selection at the nanosatellite level, where power budgets and available volume constrained what hardware could practically fit. Miniaturization has since brought CMG solutions into this mass range, with products now available for platforms as small as 1 kg.
Reaction Wheels and Control Moment Gyroscopes in Satellite ADCS: A Technical Comparison:
Reaction wheel clusters nonetheless remain the more widely deployed option at this scale. At the microsatellite level and above, CMGs become a more practical consideration as agility requirements drive mission design rather than hardware constraints.
Within the narrower NASA definition of under 180 kg, BILSAT-1, a 130 kg Turkish Earth observation microsatellite launched in 2003, remains the only documented case of CMG hardware flown in orbit aboard a small satellite, where the CMGs were carried as an experimental payload alongside its primary reaction wheel system. As of the publication of Gaude & Lappas (2020), no publicly documented case of sub-180 kg satellite operating CMGs as its primary attitude control actuator for an operational mission had been identified, except for more recent nanosatellite missions using Tensor Tech's CMG-based ADCS systems. The most complete public record of CMGs driving mission performance on a satellite within the BryceTech SmallSat range remains SPOT-6, at 712 kg, launched in 2012.
SPOT-6: A Case Study in CMG-Driven Mission Design
SPOT-6 is a 712 kg Earth observation satellite built on Airbus's AstroBus-L platform, launched on September 9, 2012. Its commercial model was built around selling high-resolution optical imagery to government and institutional customers, with the satellite required to cover large areas within a single orbital pass while collecting stereo and tri-stereo imagery. Its predecessor in the SPOT series, SPOT-5, weighed 3,030 kg and relied on reaction wheels for attitude control, with a maximum viewing angle of ±27° and no body rotation capability. When Airbus developed SPOT-6, the platform mass dropped by more than 75%, and the actuator selection changed with it. Where AstroBus-L's standard configuration uses reaction wheels, Airbus chose to replace them with Control Moment Gyroscopes.
That actuator choice reflects a fundamental difference in how CMGs generate torque. A CMG produces attitude control torque through gyroscopic effect by tilting the spin axis of a spinning rotor, rather than by accelerating or decelerating the rotor itself. This mechanism gives CMGs an inherent torque amplification capability that reaction wheels of comparable mass and power cannot match. For a mission where rapid retargeting between imaging passes is a core operational requirement, that torque difference has direct consequences for what the satellite can do in a single pass.
On SPOT-6, the CMGs serve two distinct functions. As described in the Imagery User Guide, they handle manoeuvre guidance, executing rapid transitions between successive imaging targets within a single pass, and acquisition guidance, maintaining the pointing stability required for image quality during collection.

Figure 3: Photo of SPOT-6 in the clean room of ISRO (image credit: ISRO)
The table below compares the two platforms directly.
| Parameter | SPOT-5 | SPOT-6 | Source |
|---|---|---|---|
| Launch mass | 3,030 kg | 712 kg | [13][10] |
| Primary actuator | Reaction wheel | CMG | [9][13] |
| Body rotation | No | Yes | [14] |
| Max viewing angle | ±27° | ±45° (extended) | [14][10] |
| Pointing agility | Not documented | 30° in 14 seconds (incl. stabilization) | [10] |
| Single-pass stereo | Along-track only (HRS) | Fore, nadir and aft tri-stereo | [9][10] |
| Daily acquisition capacity | Not documented | Up to 3 million km² per satellite | [10] |
The shift from SPOT-5 to SPOT-6 was not simply a mass reduction exercise. The combination of body rotation capability, extended viewing angle, and single-pass tri-stereo collection represents a qualitative change in what the satellite can do within a single orbital pass, and each of these capabilities depends on the agility that CMGs provide.
When SPOT-7 joined SPOT-6 in orbit in 2014, the two satellites operated as a coordinated constellation, with combined daily acquisition capacity reaching up to 6 million km² and tasking plans updated six times per day per satellite.
SPOT-6 launched with a design lifetime of 10 years and remains operational as of 2026, more than three years beyond its original end-of-life date. SPOT-7, launched in 2014, operated until March 2023, reaching its full design lifetime. Across both satellites, the CMG-based attitude control system continued to function throughout their operational periods without becoming a limiting factor for either mission.
What This Means for SmallSat Mission Design
The SPOT-6 case makes one thing clear: when a mission requires frequent retargeting within a single pass, the actuator choice is a mission capability decision, not just a hardware specification. SPOT-6 achieved body rotation, extended viewing angles, and single-pass tri-stereo collection because its attitude control system could execute rapid, stable manoeuvres on demand. A reaction wheel cluster of comparable mass budget would not have delivered the same agility figures.
As SmallSat average mass continues to rise into ranges where power and volume constraints are no longer the primary design drivers, this trade-off becomes relevant to a broader set of missions. SPOT-6 demonstrated in 2012 that CMGs are viable on a satellite in this mass range. For missions being designed today, the relevant question is whether the agility requirements justify the selection.
Our earlier analysis of spacecraft bus selection covered how bus class shapes the ADCS design space and where CMGs enter the picture across different mission profiles. The SPOT-6 case puts concrete performance numbers behind that framework. Readers working through an ADCS trade study may find it useful to read both pieces together.
Spacecraft Bus Selection in the Age of Agile Missions: What the Market Data Tells Us About ADCS:
For missions in the 100–1,000 kg range with high agility requirements, Tensor Tech's TensorCMG series is worth evaluating as part of the actuator trade.
References
-
NASA. What are SmallSats and CubeSats? 2015, revised 2017. https://www.nasa.gov/content/what-are-smallsats-and-cubesats
-
NASA. State of the Art of Small Spacecraft Technology, SOA Report 2025. https://www.nasa.gov/smallsat-institute/sst-soa/introduction/
-
ASI (Italian Space Agency). Micro and Nanosatellites. https://www.asi.it/en/technologies-and-engineering/micro-and-nanosatellites/
-
Sweeting, M.N. "Modern Small Satellites—Changing the Economics of Space." Proceedings of the IEEE, Vol. 106, No. 3, March 2018, pp. 343–361. https://doi.org/10.1109/JPROC.2018.2806218
-
BryceTech. Smallsats by the Numbers 2025. https://brycetech.com/reports/report-documents/smallsats-2025/BryceTech_Smallsats-by-the-Numbers-2025.pdf
-
ESA. Small Satellite Missions in the Context of the ESA Scientific Programme. ESA Bulletin 80, 1994. https://www.esa.int/esapub/bulletin/bullet80/dale80.htm
-
Lappas, V. et al. Design, Analysis and In-orbit Performance of the BILSAT-1 Microsatellite Twin Control Moment Gyroscope Experimental Cluster. AIAA-2004-5246, 2004. https://doi.org/10.2514/6.2004-5246
-
Gaude, A.; Lappas, V. "Design and Structural Analysis of a Control Moment Gyroscope (CMG) Actuator for CubeSats." Aerospace 2020, 7(5), 55. https://doi.org/10.3390/aerospace7050055
-
eoPortal. SPOT-6/7 mission page. Accessed 2026. https://www.eoportal.org/satellite-missions/spot-6-7
-
Astrium / Airbus. SPOT 6-7 Technical Data Sheet.https://www.l3harris.com/sites/default/files/2023-06/Airbus%20SPOT%206-7%20Technical%20Data%20Sheet.pdf
-
Airbus Defence and Space. SPOT Imagery User Guide. https://earth.esa.int/eogateway/documents/20142/37627/SPOT-6-7-imagery-user-guide.pdf
-
CEOS. SPOT-6 Mission Summary. CEOS EO Handbook. Accessed 2026. https://database.eohandbook.com/database/missionsummary.aspx?missionID=804
-
eoPortal. SPOT-5 mission page. Accessed 2026. https://www.eoportal.org/satellite-missions/spot-5
-
National Central University, Center for Space and Remote Sensing Research (NCU CSRSR). Common Remote Sensing Satellite Comparison. Accessed 2026. https://www.csrsr.ncu.edu.tw/rsrs/SatelliteComparison.php